































協作機械臂高校實驗室建設方案:
出于安全性、開源、接口豐富等優點的考慮,我們采用協作機械臂來構建該實驗室,提供基于ROS系統的開源功能包,可展開關于機械臂動力學和運動學的研究、機械臂運動軌跡規劃的優化問題的研究、機械臂結合夾爪的抓取控制的研究、雙臂協同運動控制的研究等。
ROS是開源的,用于機器人開發的一種后操作系統。它提供類似操作系統所提供的功能,包含硬件抽象描述、底層驅動程序管理、共用功能的執行、程序間的消息傳遞、程序發行包管理,同時也提供一些工具程序和庫用于獲取、建立、編寫和運行多機整合的程序。
ROS的運行架構是一種使用ROS通信模塊實現模塊間P2P的松耦合的網絡連接的處理架構,它執行若干種類型的通訊,包括基于服務的同步RPC(遠程過程調用)通訊、基于Topic的異步數據流通訊,還有參數服務器上的數據存儲。
協作機械臂高校實驗室建設特點:
點對點設計(降低數據計算壓力,適應多機器人系統)
多語言支持(C++、Python、Octave和LISP等)
精簡和集成(模塊化設計,代碼可單獨編譯;利用開源項目代碼)
工具包豐富
免費及開源
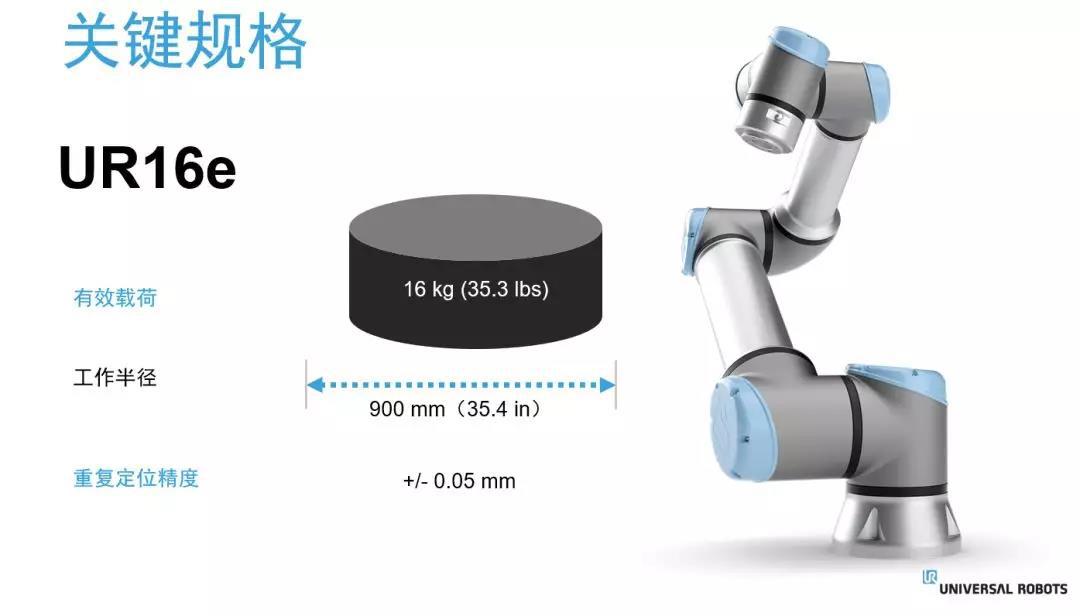
協作機械臂選型:



協作機械臂高校實驗室建設目的:
構建以機械臂為主體的研究實驗室,含括單臂、雙臂、傳感器等設備,方便師生展開關于機械臂相關的課題研究,基本滿足絕大多數的研究需求。同時,也可基于此展開關于機械臂的操作、簡易串口通訊、ROS系統、MoveIt軌跡規劃等課程實驗的教學任務,完善機器人學科的建設工作。
我司作為UR協作機器人和mir機器人優選經銷商,為您提供更多機器人自動化解決方案。
公司銷售商品: 優傲協作機器人 | MiR自主移動機器人,激光導航AGV小車 |臺達SCARA機器人 四軸機器人 | robotiq夾爪 | robotiq真空吸盤|robotiq腕部相機|onrobot夾爪 | QB softhand軟體五指靈巧手|pickit 機器人3D視覺 |所羅門3D視覺|復合機器人(AGV+機械臂)|scara螺絲機|紫外線消毒機器人
應用場景:汽車制造行業 | 3C行業 | 電子電氣 | 機械加工 | 液晶半導體 | 食品加工行業 | 醫藥行業 | 化工行業 | 教育行業 | 娛樂生活 | 其他行業
應用案例:包裝碼垛 | 擰螺絲 | 注塑成型 | 拋光打磨|實驗室分析 | 涂膠,點膠,焊接 | 機床管理 | 拾取和放置 | 裝配 | AGV | 質量檢驗 | 設備看護
協作機械臂高校實驗室建設 優傲機器人+夾爪
協作機械臂高校實驗室建設 優傲機器人+夾爪














